Magnitudes Escalares y Vectoriales
Las magnitudes físicas suelen clasificarse en mag. escalares y mag. vectoriales. Las magnitudes cuyos valores pueden representarse por números reales, positivos o negativos, se llaman ESCALARES (por ej: masa, temperatura, trabajo, etc.). Las magnitudes cuyas características se determinan tanto por sus dimensiones como por sus direcciones en el espacio, se llaman VECTORIALES (fuerza, velocidad, aceleración, etc.) y se representan por vectores.
Escalares
Son magnitudes que se expresan por medio de números reales y una unidad. Podrían ser mayores o menores a cero (positivos o negativos), pero algunas magnitudes particulares solo pueden ser positivas como la masa, la energía cinética o la variación de tiempo.
Suma (o resta) de Escalares. El resultado de sumar (o restar) dos escalares entre sí es otro escalar. Se debe cuidar que:
- Sean magnitudes del mismo tipo (se suman masas con masas, no con temperaturas).
- Tengan la misma unidad.
- Si están escritos en potencia de diez, antes de sumar cuide que sea la misma para ambos.
Multiplicación (o división).
- De un ESCALAR por un NUMERO: es otro escalar del mismo tipo.
- De un ESCALAR por otro ESCALAR: el resultado es otro escalar cuya unidad es la multiplicación (o división) de ambas unidades.
Los escalares cumplen todas las propiedades de los números reales.
Vector
Un VECTOR es un segmento de recta orientado; por lo tanto tiene longitud, dirección y sentido. Debe cumplir también con las reglas de las operaciones vectoriales.
Se simboliza por  , siendo A el origen y B su extremo, o simplemente
, siendo A el origen y B su extremo, o simplemente  .
.
encima]
Características
1. MODULO (Intensidad). Es el valor absoluto, la «cantidad» del vector, dado por su longitud. Se escribe « » o «
» o « » y se representa trazando el vector a ESCALA (por ej: 1cm → 10N). No se pone el valor al lado del vector; si se desea especificarlo se escribe aparte.
» y se representa trazando el vector a ESCALA (por ej: 1cm → 10N). No se pone el valor al lado del vector; si se desea especificarlo se escribe aparte.
 30N»; correcto — «
30N»; correcto — « » con «
» con « » escrito aparte]
» escrito aparte]
2. DIRECCION. Es la recta que contiene el vector. Ej.: Norte-Sur, vertical, horizontal, etc. En algunos casos se indica el ángulo que forma con respecto a un determinado plano, eje u otro vector (ej.: 30° con respecto a la horizontal).
[FIGURA: tres vectores mostrando dirección horizontal, vertical e inclinado]3. SENTIDO. Es hacia donde indica el vector, señalado por una flecha en su extremo. Ej.: Hacia el norte, hacia abajo. Observe que en una dirección hay dos sentidos posibles y que la dirección NO indica hacia dónde es el vector. La respuesta a «¿Cuál es la dirección de…?» NO puede ser «HACIA…».
[FIGURA: vectores mostrando: horizontal hacia la derecha, horizontal hacia la izquierda, vertical hacia arriba, vertical hacia abajo]Cuando la dirección del vector es perpendicular al plano de trabajo, el sentido se establece por convención: si el vector «sale» del plano se indica por «o» y si «entra» por «e».
4. PUNTO DE ORIGEN. Es el lugar donde comienza el vector. En el caso de la fuerza se denomina «Punto de Aplicación».
[FIGURA: vector con indicación de sus cuatro características: Punto de Origen, Módulo, Dirección y Sentido]Tipos de vectores
- Vector LIBRE. No varía si se mueve paralelamente a sí mismo; su origen puede caer en cualquier punto del espacio.
- Vector FIJO. Su origen está fijado en un punto determinado del espacio.
- Vector AXIAL o DESLIZANTE. Puede trasladarse solo a los puntos situados a lo largo de su dirección.
- Vector UNITARIO. Su módulo es igual a 1.
- Vectores OPUESTOS. Igual dirección y módulo, sentido contrario:
 ,
,  .
.
Suma de Vectores
Si son magnitudes vectoriales deben:
- Actuar sobre un mismo cuerpo (o un sistema de cuerpos si corresponde).
- Solo se puede sumar vectores entre sí.
- Ser del mismo tipo de mag. (Fuerzas con fuerzas).
- Cuidar las unidades, la potencia de diez, y todas las características vectoriales.
- La mag. resultante es otro VECTOR del mismo tipo (se deben expresar todas sus características).
Importante: La suma de vectores NO se realiza sumando sus módulos. Si se suman dos vectores de 3,0N y 4,0N, el resultado puede ser cualquier valor entre 1,0N y 7,0N.
Métodos de resolución
I) Método ANALÍTICO
Resolución a partir de ecuaciones en función de los datos e incógnitas. Tiene como ventaja ser más «mecánico», pero presenta inconvenientes: requiere dominar muchas ecuaciones, NO evita la representación del vector, y en los niveles iniciales es difícil que el alumno comprenda qué está sucediendo físicamente.
II) Método GRÁFICO
Se basa en la representación a escala de los vectores. Requiere saber representar vectores, conocer geometría y tener los instrumentos necesarios (semicírculo, compás, etc.).
II.a) Método del POLÍGONO. Se une un vector consecutivamente con el otro (el extremo de uno con el origen del siguiente). El vector resultante se traza desde el origen del primero hasta el extremo del último.
[FIGURA: método del polígono — vectores y
y  separados → unidos extremo con origen → resultante
separados → unidos extremo con origen → resultante  ]
]
II.b) Método del PARALELOGRAMO. Se forma un paralelogramo cuyos lados son los vectores sumandos y la diagonal es el vector resultante.
- Traslade los dos vectores de modo que coincidan sus orígenes.
- Del extremo de cada vector trace un segmento paralelo y de igual longitud que el otro. Se formará un paralelogramo.
- El vector resultante
 es la diagonal desde el origen común hasta el punto de corte de las líneas auxiliares.
es la diagonal desde el origen común hasta el punto de corte de las líneas auxiliares.
]
Suma de 2 vectores coplanares:
I. Dirección igual, sentido igual (ángulo: 0°)
Mét. Analítico:  . Dirección y sentido: igual a los sumandos.
. Dirección y sentido: igual a los sumandos.
II. Dirección igual, sentido contrario (ángulo: 0°)
Mét. Analítico:  . Dirección igual a ; sentido igual al de mayor módulo.
. Dirección igual a ; sentido igual al de mayor módulo.
III. Dirección perpendicular (ángulo: 90°)
![\[C = \sqrt{A^2 + B^2} \qquad \text{tg}\,\gamma = \frac{A}{B}\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-27c6830e1bf5ea2e34e63274562235ec_l3.png "Rendered by QuickLaTeX.com")
IV. Dirección distinta (ángulo: cualquiera)
![\[C = \sqrt{A^2 + B^2 + 2 \cdot A \cdot B \cdot \cos\alpha}\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-bb3d2d137f97a5a019d391ba4453a263_l3.png "Rendered by QuickLaTeX.com")
![\[\alpha + \beta = 180° \Rightarrow \cos\alpha = -\cos\beta\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-924d42071eac93fbf75c4eac0c68069e_l3.png "Rendered by QuickLaTeX.com")
Problemas:
- ¿En qué caso el módulo del vector resultante es igual a la suma de los módulos de los vectores sumandos?
- Se suman dos vectores de 20N y 40N. ¿Cuánto vale el módulo del vector resultante?
- Demuestre que la ecuación del caso IV sirve para todos los casos.
Magnitudes Vectoriales con IGUAL DIRECCIÓN
Cuando todas las mag. vectoriales tienen la misma dirección, la complejidad vectorial se simplifica. Se asigna el signo positivo a un sentido y el negativo al otro (elección arbitraria). A partir de esto:
- El signo del módulo indica el sentido. Ej.: si
 , el sentido es hacia la izquierda.
, el sentido es hacia la izquierda. - Si todas las mag. tienen el mismo sentido, a este se le atribuye el signo positivo.
- Si las mags. tienen diferentes direcciones, NO se puede «hablar» de positivo o negativo.
Suma de 3 o más vectores: 
Método del Polígono: se une cada vector consecutivamente con el siguiente. El resultante va desde el origen del primero hasta el extremo del último.
[FIGURA: suma de tres vectores por el método del polígono]Método del Paralelogramo: se suma primero dos vectores y a la resultante se le suma el tercero.
[FIGURA: suma de tres vectores por el método del paralelogramo, en dos pasos]Resta de Vectores: 
Forma 1 — Transformar en suma:
![\[\vec{A} = \vec{C} - \vec{B} \Rightarrow \boxed{\vec{A} = \vec{C} + (-\vec{B})}\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-4932fa4d20f58957a84681d9f134030b_l3.png "Rendered by QuickLaTeX.com")
donde  es el vector opuesto a .
es el vector opuesto a .
, resoluciones por polígono y paralelogramo]
Forma 2 — A partir de lo «faltante»:
![\[\vec{A} = \vec{C} - \vec{B} \Rightarrow \boxed{\vec{A} + \vec{B} = \vec{C}}\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-9696db88323e84ae17fe96ea13daf38f_l3.png "Rendered by QuickLaTeX.com")
Hay que obtener un vector que sumado a (conocido) dé el vector (conocido).
Descomposición de Vectores
Si se tiene el vector resultante y se quiere saber qué vectores lo componen, se tendría infinidad de soluciones posibles. Para resolverlo se debe dar más información: las direcciones de los vectores componentes a través de un esquema y/o el ángulo que forman con el vector resultante.
[FIGURA: vector con ángulo  y líneas punteadas indicando las direcciones de las componentes
y líneas punteadas indicando las direcciones de las componentes  y
y  ]
]
Método Analítico (Teorema del Seno):
Datos:  , y
, y  . Incógnitas:
. Incógnitas:  y
y  . Con
. Con  y
y  :
:
![\[\boxed{A_1 = \frac{\text{sen}\,\beta \cdot A}{\text{sen}\,\delta}} \qquad \boxed{A_2 = \frac{\text{sen}\,\alpha \cdot A}{\text{sen}\,\delta}}\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-aef3b0a2eaaa88364631562058877184_l3.png "Rendered by QuickLaTeX.com")
Suma de Vectores por Descomposición
Caso particular de uso común: ejes perpendiculares (90°) para las componentes de , y .
![\[\vec{C} = \vec{A} + \vec{B} \Rightarrow \begin{cases} \text{Eje } x: & C_x = A_x + B_x = A\cos\alpha + B\cos\beta \\ \text{Eje } y: & C_y = A_y + B_y = A\,\text{sen}\,\alpha + B\,\text{sen}\,\beta \end{cases}\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-bde57ddf6236c9ed58b005db7263c79a_l3.png "Rendered by QuickLaTeX.com")
![\[\boxed{C^2 = C_x^2 + C_y^2} \qquad \boxed{\text{tg}\,\gamma = \frac{C_y}{C_x}}\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-50f2dc9b440f205233ae7fc902c2c0a5_l3.png "Rendered by QuickLaTeX.com")
, y con sus componentes en ejes coordenados — métodos paralelogramo, polígono y analítico]
Caso particular A: una componente () coincide con el eje ( ).
).
![\[B_x = B,\quad B_y = 0,\quad A_x = A\cos\alpha,\quad A_y = A\,\text{sen}\,\alpha\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-2d4436fa240fbf43e88d4e5652872a69_l3.png "Rendered by QuickLaTeX.com")
![\[C_x = A\cos\alpha + B, \quad C_y = A\,\text{sen}\,\alpha\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-f4b0c0495c7010aef36f1847cccb4e85_l3.png "Rendered by QuickLaTeX.com")
sobre el eje  ]
]
Caso particular B: la resultante () coincide con el eje ( ).
).
![\[C_y = 0 \Rightarrow A_y = B_y \Rightarrow A\,\text{sen}\,\alpha = B\,\text{sen}\,\beta\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-3d25d6356df5823d739992a6a636c220_l3.png "Rendered by QuickLaTeX.com")
![\[C = C_x = A_x + B_x = A\cos\alpha + B\cos\beta\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-80e974f8d682bad09e1149c335269051_l3.png "Rendered by QuickLaTeX.com")
sobre el eje ]
Situaciones (análisis de casos)
A partir de tres vectores , y (siendo la resultante de y ) con ángulos , ,  y
y  donde y , se pueden plantear múltiples situaciones según qué magnitudes son datos y cuáles incógnitas.
donde y , se pueden plantear múltiples situaciones según qué magnitudes son datos y cuáles incógnitas.
, , y ángulos , , , ]
Las relaciones fundamentales que se aplican son el Teorema del Seno y el Teorema del Coseno:
![\[\frac{\text{sen}\,\alpha}{A} = \frac{\text{sen}\,\beta}{B} = \frac{\text{sen}\,\mu}{C}\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-7bac48d17c4ece2b0a8949c61f6ecbf2_l3.png "Rendered by QuickLaTeX.com")
![\[C^2 = A^2 + B^2 + 2AB\cos\mu\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-6f054d3ea02deac63db8697455d81b67_l3.png "Rendered by QuickLaTeX.com")
A continuación se resumen los casos más importantes:
| Situación | Datos | Incógnitas | Similar a |
|---|---|---|---|
| 1 | ,  , ,  | , | — |
| 2 | , , | , | — |
| 3 | , , | , | 2 |
| 4 | , , | , | — |
| 5 | , , | , | — |
| 6 | , , | , | — |
| 7 | , , | , | 4 |
| 8 | , , | , | 5 |
| 9 | , , | , | 6 |
| 10 | , , | , | — |
| 11 | , , | , , | — |
Para cada situación se pueden aplicar los métodos del Polígono, Paralelogramo, Analítico y por Descomposición según corresponda.
[FIGURA: resoluciones gráficas y analíticas de las situaciones 1 a 11]Producto de un Vector por un Escalar
El producto de un vector por un escalar  es un VECTOR con las siguientes características:
es un VECTOR con las siguientes características:
- Es una NUEVA magnitud (ej.: si es masa y es aceleración, el producto es una fuerza).
- Su dirección es la misma que .
- Su módulo es
 .
. - Su sentido es el mismo que si
 , o contrario si
, o contrario si  .
.
Ejemplo:  ,
,  (horizontal hacia la derecha).
(horizontal hacia la derecha).
![\[\vec{F} = m \times \vec{a} \Rightarrow F = 4{,}0\,\text{Kg} \times 10\,\frac{\text{m}}{\text{s}^2} = \boxed{40\,\text{N}}\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-739dcc57849a2f4b12507bd462c058be_l3.png "Rendered by QuickLaTeX.com")
y vector  resultante, más largo, con escala indicada]
resultante, más largo, con escala indicada]
Producto entre Vectores
Producto ESCALAR
El producto escalar de dos vectores y que forman un ángulo se define como el producto de los módulos por el coseno del ángulo que forman:
![\[\boxed{E = \vec{A} * \vec{B} = A \cdot B \cdot \cos\mu}\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-5d5ca8dc3b2296bc68fcbb7cac6ecd01_l3.png "Rendered by QuickLaTeX.com")
Casos particulares:



 es la componente de en la dirección de , por lo tanto
es la componente de en la dirección de , por lo tanto  . Análogamente
. Análogamente  .
.
sobre la dirección de y viceversa]
Producto VECTORIAL
El producto vectorial de dos vectores y que forman un ángulo se define como el producto de los módulos por el seno del ángulo que forman:
![\[\boxed{\vec{V} = \vec{A} \wedge \vec{B}} \qquad V = A \cdot B \cdot \text{sen}\,\mu\]](https://leonardotrujillo.uy/wp-content/ql-cache/quicklatex.com-9dcb7cf09130c82df7e8f0581e607eb2_l3.png "Rendered by QuickLaTeX.com")
Dirección: perpendicular al plano formado por y :  .
.
Sentido: se determina por la REGLA DE LA MANO DERECHA.
[FIGURA: vectores y en un plano con  perpendicular saliendo del plano]
perpendicular saliendo del plano]
Casos particulares:



Regla de la mano derecha
- Ponga la mano derecha como muestra la figura.
- Ponga el borde del dedo meñique sobre el vector que está en primer término () y mueva la mano hacia el otro ().
- La punta del dedo pulgar indica el sentido de .
, y ]
Regla de la mano izquierda
- Ponga la mano como muestra la figura y NO la modifique.
- El dedo mayor coincide con el 1er. término () y el índice con el 2do. ().
- El dedo pulgar indica el sentido de .
Problemas:
- Demuestre que si
 .
. - ¿Qué dirección tiene si y están sobre el plano del: a) pizarrón y b) escritorio?
- Se desea realizar el producto vectorial entre y
 . a) ¿Qué ángulo se debe considerar? b) ¿Qué sentido tiene el vector resultante?
. a) ¿Qué ángulo se debe considerar? b) ¿Qué sentido tiene el vector resultante?
Seudovectores
NO todas las magnitudes que tienen módulo, dirección y sentido son magnitudes vectoriales, ya que no cumplen con las propiedades de la suma. Por ejemplo, en la rotación finita de un cuerpo rígido, si se cambia el orden de las rotaciones el resultado es diferente.
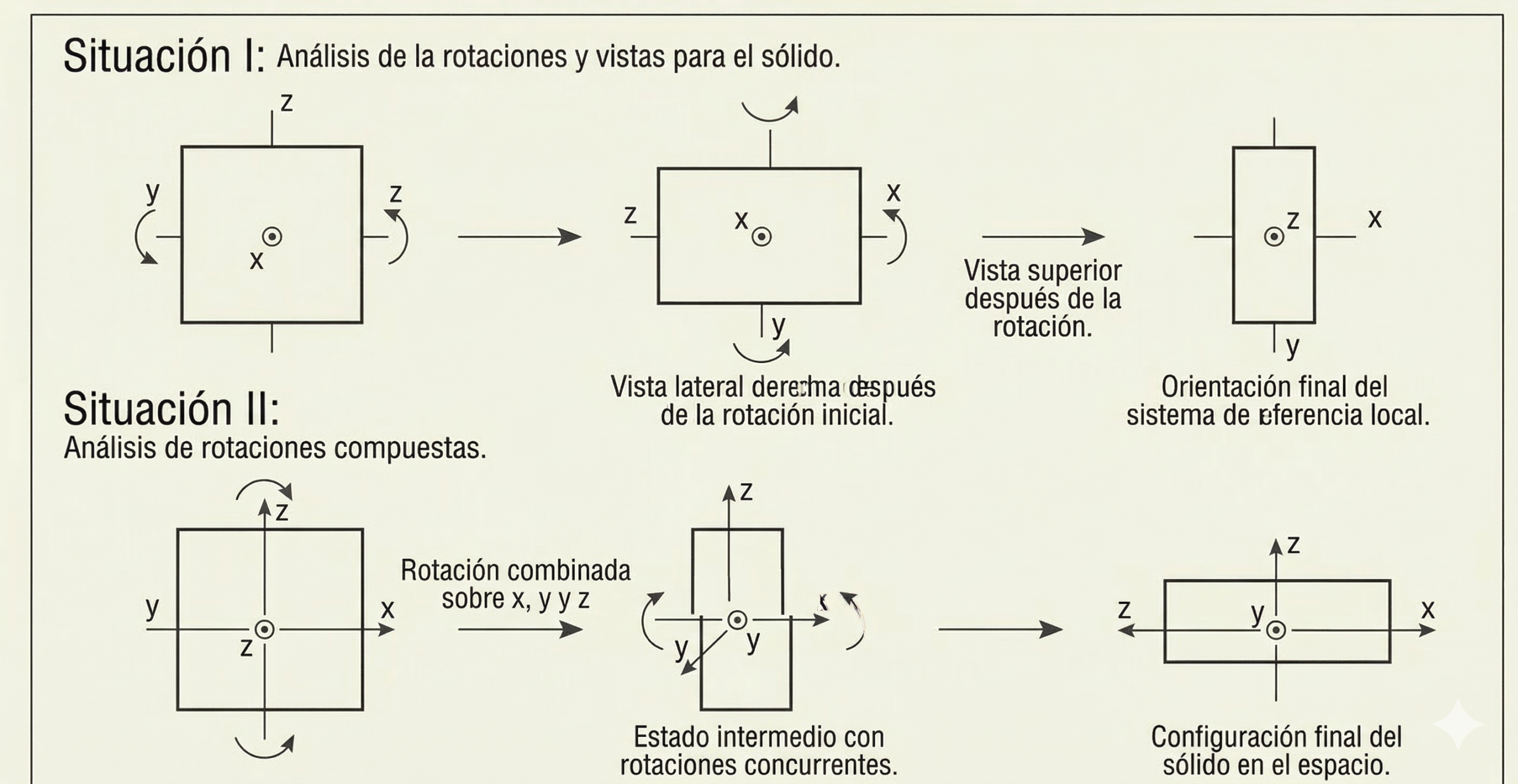
Si en cambio se trabaja con valores «infinitamente» pequeños, se los puede considerar como vectores. Si además todos los seudovectores tienen la misma dirección, se los puede tratar como escalares.
En 5to. año las magnitudes seudovectoriales son las rotacionales (Momento cinético, velocidad angular, etc.), que se analizan con respecto a un eje fijo de giro coincidente con su dirección. Por lo tanto se puede trabajar con ellos como escalares (aunque no lo sean).